Chapitre 2: Angles de suivi
cours
| Site: | Touch By SukaJanda01 |
| Cours: | Captation (Année 2015) |
| Livre: | Chapitre 2: Angles de suivi |
| Imprimé par: | Visiteur anonyme |
| Date: | mercredi 2 juillet 2025, 03:22 |
1 Introduction
La quantité d’énergie recueillie par un capteur sera d’autant plus importante que l’incidence du rayonnement reçu sera proche de la normale. Ainsi, dans ce présent chapitre, nous nous intéressons à l’angle d’incidence pour un capteur fixe et aux angles de suivi pour un capteur mobile.
2 . Angle d’incidence sur une surface fixe
Il s'agit d'évaluer le cosinus de l'angle d'incidence pour différentes orientations d'un capteur.
2.1 . Définition
L’angle d’incidence est l’angle la direction du soleil et la normale de la surface d’ouverture du capteur.
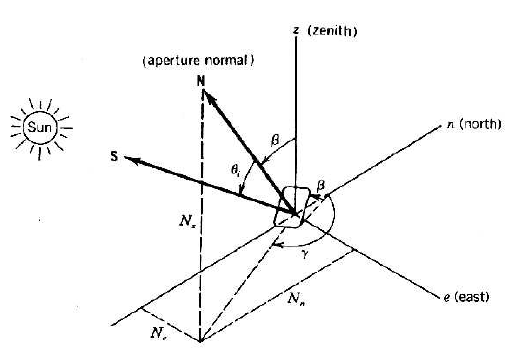
Figure 1 : Capteur plan fixe incliné
β : angle d’inclinaison du capteur par rapport au plan horizontal
θi: angle d’incidence
γ : angle entre la projection de la normale et le Nord ou azimut du capteur
N : Normale à la surface du capteur
S : Direction du soleil
2.2 . Cosinus de l’angle d’incidence
Le cosinus de l’angle d’incidence est défini par le produit : S.N
![]() (1)
(1)
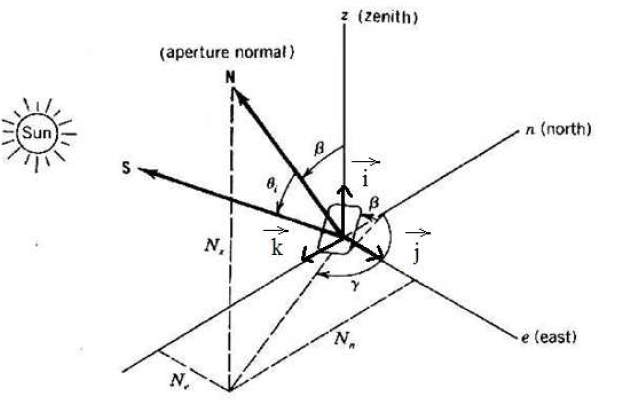
Figure 2 : Système de coordonnées horizontales pour les vecteurs S et N
On a:
 (2)
(2)
or
![]() (3)
(3)
D'où
 (4)
(4)
- Surfaces d’ouverture horizontale : β=0
![]() (5)
(5)
- Surfaces d’ouverture verticale : β=π/2
![]() (6)
(6)
- Surfaces inclinées face Sud : γ=π
![]() (7)
(7)
3 .Angles d’incidence sur une surface mobile
Quelques types de capteurs suivent le soleil de manière à réduire au maximum l’angle d’incidence par conséquent d’augmenter le flux incident du capteur. C’est pourquoi, il est utile de déterminer l’angle incidence et les angles de suivi. Selon le type de suivi, les capteurs mobiles sont classés en deux catégories :
-les capteurs à concentration linéaire : le suivi suivant un seul axe
-les capteurs à concentration ponctuelle : le suivi se fait suivant deux axes.
3.1 .Suivi à un seul axe
2.1.1. Angle de suivi et angle d'incidence
Un système de suivi fait tourner le capteur à concentration autour d’un axe de rotation jusqu’à ce que le rayonnement solaire et la normale au capteur soit coplanaire.
La figure suivante illustre une surface d’ouverture en mouvement de rotation autour d’un axe en vue de suivre le soleil.
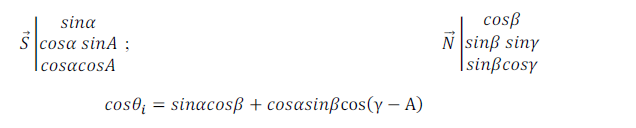
Figure 3 : Surface d’ouverture en rotation autour de l’axe r
S est dans le plan formé par r et N
θi : angle d’incidence
ρ : angle de suivi défini par lorsque N est vertical
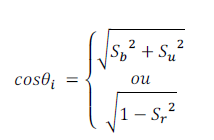
Pour déterminer les angles θi et ρ en fonction des coordonnées du système horizontal, nous adoptons le système de coordonnées (u,b,r) dont r est le vecteur unitaire d’un des axes du système et u vecteur unitaire de l’axe vertical.
N tourne toujours dans le plan u,b.
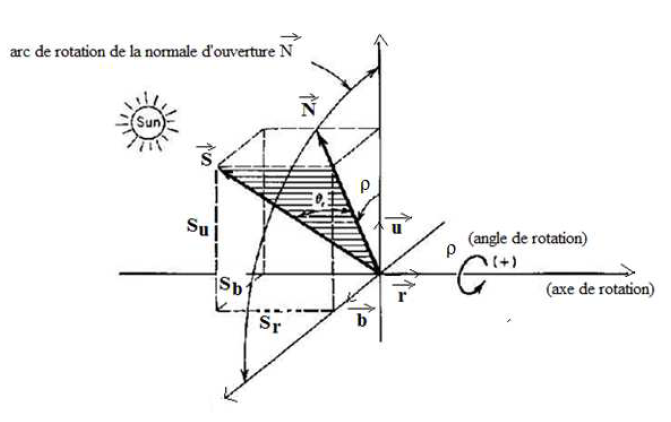
Figure 4 : Système de coordonnées avec un seul axe de suivi r
On a :
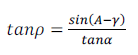
Pour l’angle de suivi :
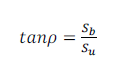 (8)
(8)
S est un vecteur unitaire, sa projection sur le plan r-b nous permet de déterminer le cosinus de l’angle d’incidence
 (9)
(9)
2.1.2. Axe de suivi horizontal
Pour décrire les différents schémas de suivi, nous utilisons le passage du système d’axes (u,b,r) système d’axes (z,e,n) par rotation autour de l’axe z.
Figure 5 : Passage du système d’axes (u,b,r) au système d’axes (z,e,n) par rotation autour de l’axe z
On a la matrice de rotation suivante :
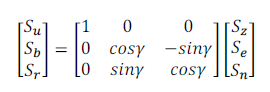 (10)
(10)
Par développement et en remplaçant, on a les formules générales de l’angle de suivi et du cosinus de l’angle d’incidence tel que :
 (11)
(11)
et
![]() (12)
(12)
Ces formules peuvent être simplifiées pour les cas suivants :
- Axe de suivi orienté dans la direction Nord-Sud
![]() (13)
(13)
et
![]() (14)
(14)
- Axe de suivi orienté dans la direction Est-Ouest
![]() (15)
(15)
et
![]() (16)
(16)
2.1.3. Axe de suivi incliné
L’axe de suivi est incliné arbitrairement d’un angle β par rapport à l’horizon
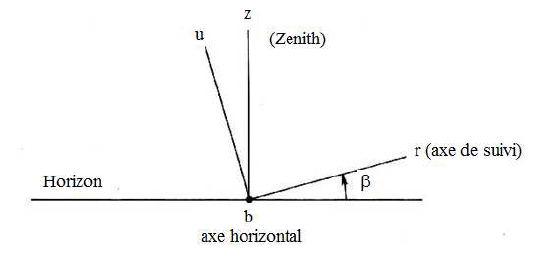
Figure 6 : Rotation des coordonnées du capteur autour de l’axe horizontal b
On a :
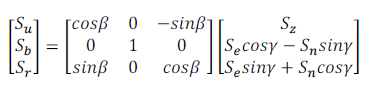 (17)
(17)
En développant les équations on obtient
![]() (18)
(18)
et
![]() (19)
(19)
Ces équations se simplifient lorsque le capteur est incliné face Sud en posant
γ=180°
2.1.4. Décalage de la surface d’ouverture
Dans certains cas de figure, la surface d’ouverture est décalée d’un angle μ.
L’angle de suivi est déterminé à partir de l’équation (18) lorsque N demeure dans le plan formé par S et N. L’angle d’incidence devient la somme de l’angle d’incidence calculée dans l’équation (19) et de μ.
μ est positif lorsque le décalage se fait dans le sens trigonométrique autour de l’axe b.
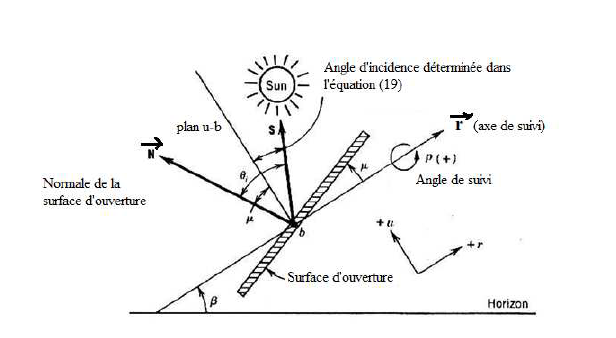
Figure 7: Surface d’ouverture décalée avec suivi suivant l’axe r
Particulièrement pour les équations (18) et (19), deux cas pratiques ont lieu:
-capteur disposé verticalement
-capteur dont l'angle de suivi est incliné à la latitude du lieu
2.1.4. Quelques cas de suivi habituels
- Axe de suivi vertical
Lorsque l'axe de suivi est colinéaire à l’axe du zenith, on a:
 (20)
(20)
Par convention l’angle de suivi est compté positivement dans le sens trigonométrique.
- Axe de suivi vertical avec une surface d’ouverture décalée
La surface d’ouverture est décalée d’un angle μ par rapport à l’axe vertical de rotation
 (21)
(21)
μ=0, lorsque l’axe de suivi est dans le plan de la surface d’ouverture du capteur.
- Axe de suivi incliné à la latitude du lieu
Lorsque l’axe de suivi est incliné d’un angle égal à la latitude du lieu, l’axe de rotation devient parallèle à l’axe des pôles. On a:
 (22)
(22)
Toutefois, l’angle horaire varie de 15° par heure, un simple système à horloge peut permettre de faire le suivi.
3.2 Suivi à deux axes
Lors de la poursuite suivant deux axes, la surface d’ouverture est toujours normale aux rayons solaires, par conséquent:
![]() (24)
(24)
Il n’y a pas d’effet cosinus.
Deux types de monture sont généralement utilisés pour le suivi sur deux axes :
-la monture altazimutale
-la monture équatoriale
3.2.1. Monture altazimutale
La monture altazimutale est mobile autour de deux axes perpendiculaires, l’un vertical et l’autre horizontal.
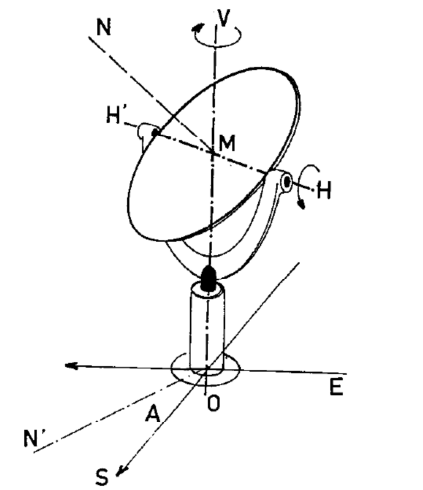
Figure 8 : monture altazimutale
La rotation autour de l’axe horizontal assure la poursuite du soleil en hauteur et l’axe vertical assure le suivi suivant l’azimut.
L’asservissement de la commande par système electro-optique est relativement aisé mais la poursuite par programme-horloge est beaucoup plus délicate à obtenir de manière très précise. En négligeant la variation de la déclinaison durant la journée et en dérivant l’équation(13), on peut obtenir l’évolution de la hauteur en fonction du temps.
![]() (25)
(25)
L’évolution de l’angle autour de l’axe vertical est faible, en dérivant l’équation (14) on a:
![]() (26)
(26)
3.2.2. Monture équatoriale
Le mouvement apparent du soleil est à peu près un mouvement uniforme dans un plan perpendiculaire à l’axe du monde. La monture imagée à partir de cette considération est la monture équatoriale. Elle permet une rotation autour d’un axe parallèle à l’axe polaire et autour d’un axe perpendiculaire au précédent.
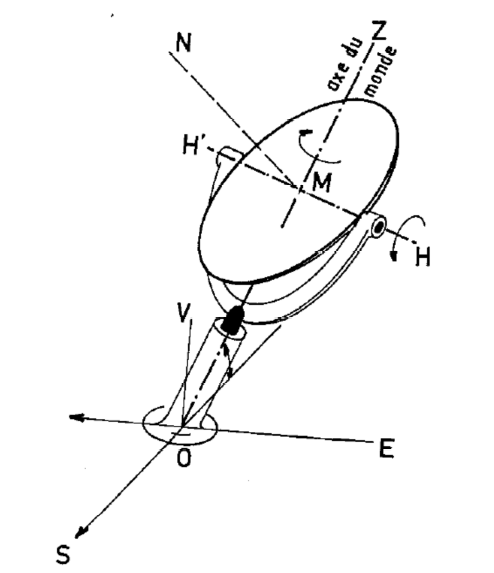
Figure 9: Monture équatoriale
L’angle de suivi autour de l’axe polaire est égal à l’angle horaire du soleil ω.
L’angle de suivi autour de l’axe perpendiculaire à l’axe polaire correspond à la déclinaison.
-l’évolution autour de l’axe polaire est uniforme et égale à 15 degrés/heure
-la variation de la déclinaison atour de l’axe perpendiculaire à l’axe polaire est très lente, elle dépend de la période de l’année. Cependant sa loi de variation peut être déterminée en dérivant la formule approchée de la déclinaison:
![]() (27)
(27)
On a:
 (28)
(28)
4 .Applications
Le suivi est surtout utilisé dans les capteurs à concentration qui se classent en deux grandes familles selon le type de suivi
-Capteurs à concentration linéaire dont les capteurs cylindro-paraboliques ( PTC: parabolic Trough collector et les réflecteurs linéaires de Fresnel ( LFR: Linear Fresnel Reflector). Le suivi se fait selon un seul axe.
-Capteurs à concentration ponctuelle dont les paraboles(Dish) et les héliostats. Le suivi se fait selon deux axes.